|
I am a third-year PhD student in Computer Science at University of Southern California. I am lucky to be advised by Prof. Erdem Bıyık. My Research interests lie in Robotics, Imitation Learning, Human-in-the-loop Learning, Human-Robot Interaction and Reinforcement Learning. I specifically focus on developing algorithms that enable AI agents to model the behaviors and goals of humans and other agents by leveraging different forms of information, including explicit forms such as human demonstrations and comparisons, and more implicit forms such as human gaze and gestures. My aim is to equip AI agents and robots with the capability to understand and align with humans' goals and preferences. Previously, I worked with Prof. Xiaolong Wang on Imitiation Learning for dexterous manipulation. I started Machine Learning research with Prof. Burak Acar at Bogazici University. Fun Fact: My name is pronounced as Yeet. |

|
|
PhD. in Computer Science, University of Southern California
2023-present
|
|
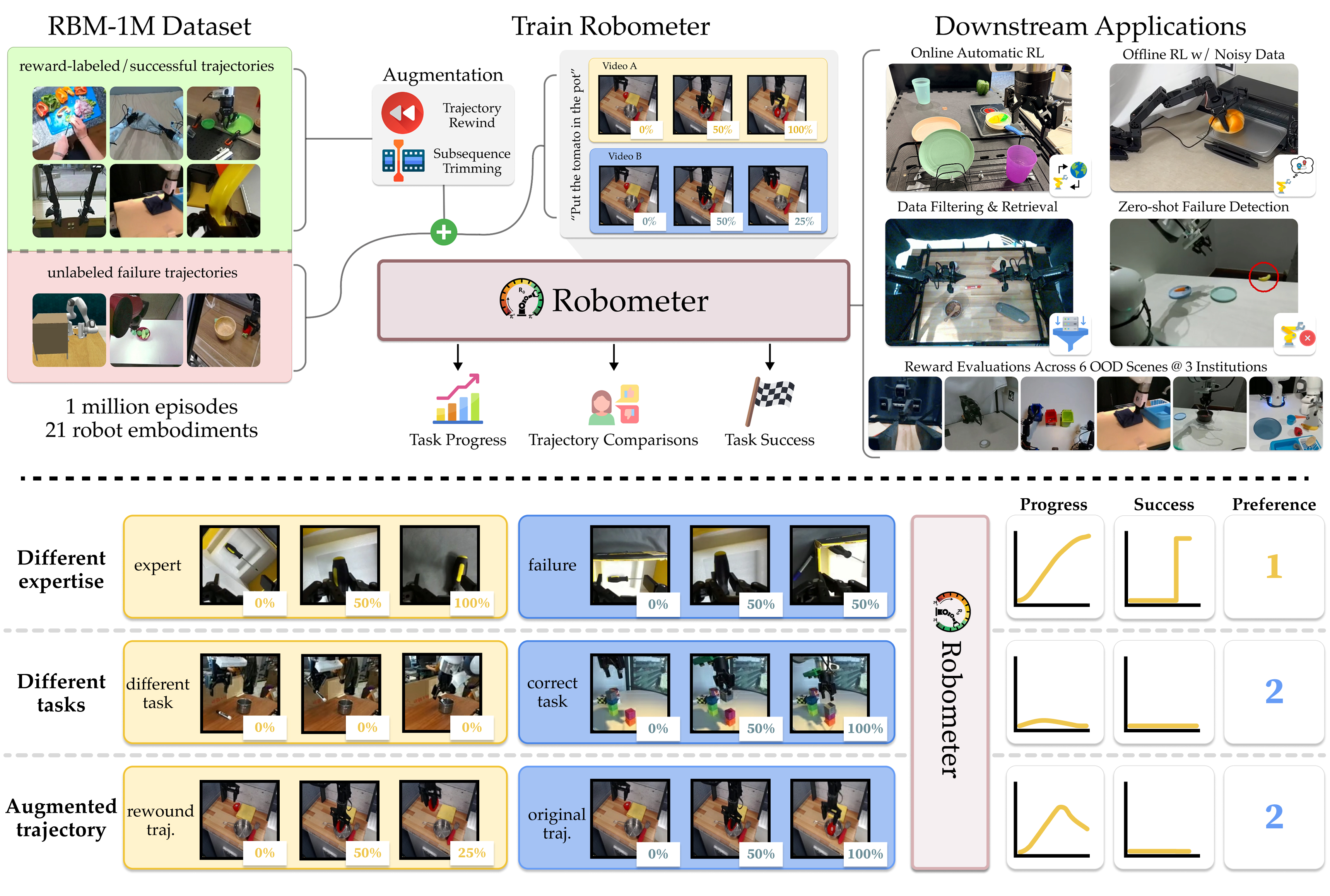
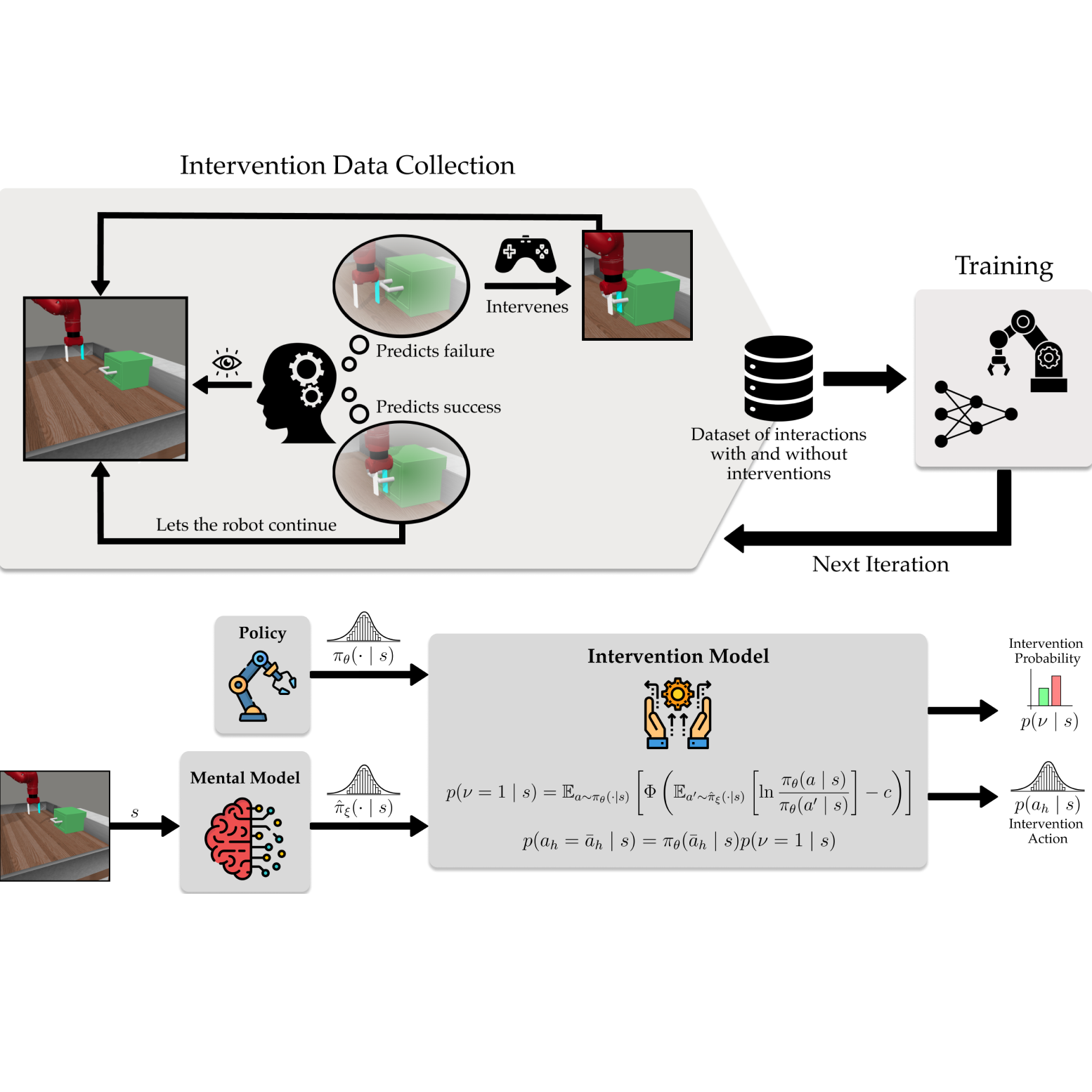
Apr 2026 - Robometer is accepted to RSS 2026!
|
|
|
|
|

|
Yigit Korkmaz code Transformer networks are highly utilized in Natural Language Processing(NLP) tasks. In this project, the use of Longformer, which is a transformer based network with advanced attention mechanism, in classifying argumentative elements of students’ writing will be discussed. |
|
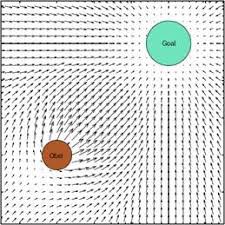
Yigit Korkmaz code In this project, APF(artificial potential fields), which a method used to formulate obstacle and goal interactions in a robot’s path, is implemented. With the assumption of a known map, obstacles act as repulsive forces where targets act as attractive ones. The code is written for ROS environment, and experimented on real robots. |
|
Template is from Jon Barron's awesome website. |